I was recently poking around inside the original Power Macintosh G3’s ROM and accidentally discovered an easter egg that nobody has documented until now.
This story starts with me on a lazy Sunday using Hex Fiend in conjunction with Eric Harmon’s Mac ROM template (ROM Fiend) to look through the resources stored in the Power Mac G3’s ROM. This ROM was used in the beige desktop, minitower, and all-in-one G3 models from 1997 through 1999.
As I write this post in mid-2025, I’m having a really difficult time accepting the fact that the Power Mac G3 is now over 27 years old. Wow!
While I was browsing through the ROM, two things caught my eye:
First, there was a resource of type HPOE which contained a JPEG image of a bunch of people, presumably people who worked on these Mac models.
This wasn’t anything new; Pierre Dandumont wrote about it back in 2014. However, in his post, he mentioned that he hadn’t figured out how to display this particular hidden image on the actual machine. Several older Macs have secret keypress combinations to show similar pictures, but the mechanism for displaying this one was a complete mystery.
I recently found myself needing to change the monitor that a cheap HDMI “dummy plug” pretended to be. It was a random one I had bought on Amazon several years ago that acted as a 4K monitor, and I needed it to be something simpler that didn’t support a 4K resolution. The story behind why is a long one that I’m still figuring out and might eventually become a separate blog post in the future.
If you’re not familiar with dummy plugs, here’s a quick primer: they are tiny dongles you can plug into an HDMI, DVI, etc. port that don’t actually do anything with the video signal. They simply have the minimum circuitry needed for a video source device, like a computer, to think that a monitor is hooked up. In general this entails a pull-up resistor on pin 19 (HPD) to +5V, as well as a little I2C EEPROM chip containing the Extended Display Identification Data (EDID). This is useful for headless machines to force the OS to think a monitor is attached.
The EDID contains all the info about the monitor: the manufacturer, manufacture date, supported resolutions, audio channels, color space, and stuff like that. My goal was to replace the dummy plug’s EDID with an identical copy of an EDID from one of my many 1080p HDMI capture devices. Then, the computer I plugged it into would think the capture device was plugged in instead of a 4K monitor, and everything would be hunky dory.
As part of my research into the Macintosh Performa 550’s factory recovery partition, I paid a lot of attention to eBay listings for these computers. I came to an interesting discovery that I had already suspected: big CRT-based Macs in this form factor are regularly damaged in shipping after being sold on eBay.
Most vintage computer enthusiasts are well aware of this, but the plastic in old computers tends to become very brittle as it ages. With Macs in particular, machines made from 1993-ish onward seem to really be affected by this issue. I’ve seen this with my own eyes, too. The CD-ROM bezel on my Quadra 840av fell off because several very thin plastic clips snapped off. Good luck finding one that hasn’t already broken off. One of the clips that holds the top case in place on my Power Mac 6100 also broke off. And I, too, once received a Performa 550 that was destroyed in shipping.
For what it’s worth, I have experienced success with smaller “pizza box” Macs shipped to me. They are definitely from the same era of terrible plastic, but they have always been generously covered in all directions with bubble wrap and none of the ones I have received have ever been damaged in transit. I think the fact that they aren’t super heavy or large helps a lot.
I was curious about bigger, heavier machines though, especially since I had experienced destruction on one myself. I decided to do a quick little research project on eBay. I went through all past auctions I could find for the Macintosh Performa/LC 5xx form factor. Sadly, eBay’s history doesn’t go back very far, so it’s hard to get a decent sample size. Regardless of the lack of data, what I found doesn’t look promising for prospective buyers. Out of 12 total computers sold, I found:
I’ve been noticing a lot of fun stories lately about bugs in old software that suddenly showed up in newer Windows versions. For example, here’s an excellent writeup by Silent about a bug in Grand Theft Auto: San Andreas that laid dormant until Windows 11 24H2 came out. MattKC also recently posted a cool video about the massive project of decompiling LEGO Island, which also solved the mystery of the “exit glitch” that happened in newer versions of Windows. Nathan Baggs has also been at it again, fixing a modern compatibility issue with Sid Meier’s Alpha Centauri this time.
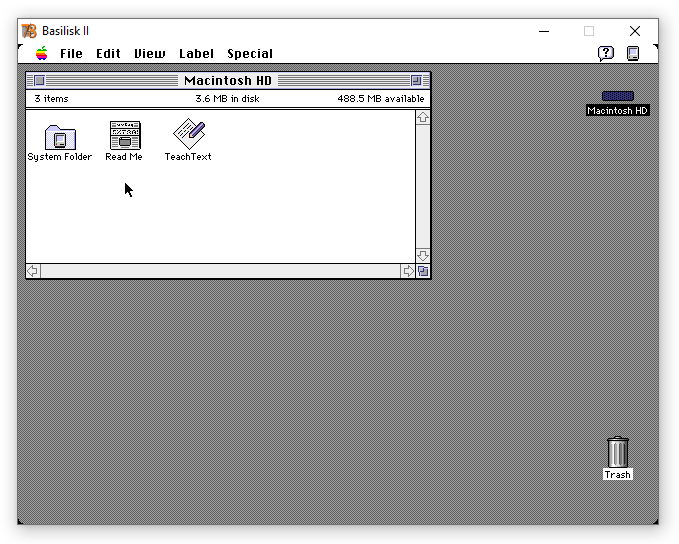
I won’t spoil these stories for you, but they all reminded me of a bug that I fixed twelve years ago in Basilisk II but never wrote about until now. Basilisk II is one of the more popular 68k Mac emulators, allowing you to run an old Mac system on your modern machine. Nowadays, you can even run it in your browser using Infinite Mac! Here’s a screenshot of Basilisk II running on my Windows 10 machine.
The bug was: when you launched it, the emulated Mac would just sit there with a black screen rather than booting up. It didn’t happen every time, which really confused everybody. The problem seemed to be way more common on newer Windows versions, which were Vista and 7 at the time, but people also occasionally saw it on XP too. It definitely failed most of the time for me with Windows 7. Nobody was seeing this issue on Mac OS X or Linux.
In my last post about hard drives that go bad over time, I hinted at having rescued a lost piece of obscure Apple software history from an old 160 MB Conner hard drive that had its head stuck in the parked position. This post is going to be all about it. It’s the tale of a tad bit of an obsession, what felt like a hopeless search, and how persistence eventually paid off. There’s still an unsolved mystery too, so I’m hoping others will see this and help to fill in the blanks!
This whole saga starts with a very interesting blog post written by Pierre Dandumont in 2022. Pierre’s (excellent) blog is in French — Google does a good job of translating it for me. He found a quote in a book referring to special functionality bundled with Apple’s Macintosh Performa 550 computer:
The LC 550’s Secret Partition
If Apple’s programmers, in creating the Performa series, were aiming to make idiot-proof computers, they were serious about it. The Performa 550 is an amazing case in point. When you run the included Apple Backup program (see Chapter 15), you get a little surprise that you didn’t count on: a hidden partition on your hard drive!
This invisible chunk of hard drive space contains a miniature, invisible System Folder. Apple’s internal memo explains it this way:
“When a system problem (one that prevents the Performa from booting) is detected, a [dialog box] informs the user of a system problem. The user can choose to fix the problem manually or to reinstall software from the backup partition’s Mini System Folder.”
If you choose to reinstall your System software, you get the wristwatch cursor for a moment while the miniature System Folder is silently copied to your main hard-drive partition. The Performa restarts from the restored hard drive, and the invisible system partition disappears once again.
We got a Performa team member to admit that this kind of sneaky save-the-users-from-themselves approach may well be adopted in other Performa models.
Who knows what goodness lurks in the hearts of men?
As part of my work toward an upcoming post about a lost piece of very obscure Mac history that has finally been found, I’ve been playing around with old Apple-branded SCSI hard drives made by Quantum and Conner in the 1990s. What I’m about to describe is already common knowledge in the vintage computing world, but I thought it would be fun to share my take on it anyway.
What I’m talking about is how a lot of these hard drives just refuse to work anymore. This is very common with old Quantum ProDrive models, like the LPS or the ELS. The drive spins up, you don’t hear the expected pattern of click sounds at startup, and then after a few seconds, it spins back down.
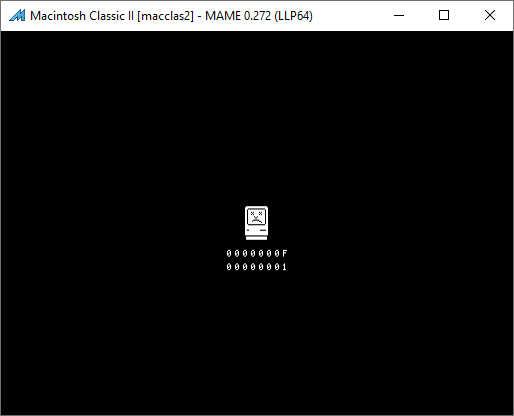
This is the story of how Apple made a mistake in the ROM of the Macintosh Classic II that probably should have prevented it from booting, but instead, miraculously, its Motorola MC68030 CPU accidentally prevented a crash and saved the day by executing an undefined instruction.
I’ve been playing around with MAME a lot lately. If you haven’t heard of MAME, it’s an emulator that is known best for its support of many arcade games. It’s so much more than that, though! It is also arguably the most complete emulator of 68000-based Mac models, thanks in large part to Arbee‘s incredible efforts. I will admit that I’ve used MAME to play a game or two of Teenage Mutant Ninja Turtles: Turtles in Time, but my main use for it is Mac emulation.
Here’s how this adventure begins. I had been fixing some issues in MAME with the command + power key combination that invokes the debugger, and decided to see if the keystroke also worked on the Classic II. Even though this Mac model has a physical interrupt button on the side, it also has an “Egret” 68HC05 microcontroller for handling the keyboard and mouse (among other things) that should be able to detect the keypress and signal a non-maskable interrupt to the main CPU. I believe the Egret disables this keystroke by default, but MacsBug contains code that sends the command to enable it.
I didn’t get very far while testing the command+power shortcut in MAME’s emulated Classic II, because I observed something very odd. It booted up totally fine in 24-bit addressing mode, but I could not get it to boot at all if I enabled 32-bit addressing, which I needed in order for MacsBug to load. It would just pop up a Sad Mac, complete with the Chimes of Death. On this machine, the death chime is a few notes from the Twilight Zone theme song.
Fitting in with my recent trend of repairing video capture/camera devices, this time I found a non-working NZXT Signal 4K30 HDMI capture device on eBay. The description of the item was: Tested and the unit powers on, but is not detected by NZXT Cam software. Unable to test further due to this.
When I received it, I replicated exactly what the listing said. The white light on the front turned on, but then nothing happened. No USB device was detected by my computer at all. Opening it up, I was able to get an idea of the overall architecture. Someone else has also torn this device down, so I didn’t have to start completely from scratch.
I’ve recently been on a bit of a repair kick and wanted to tell another fun repair story. I promise my blog isn’t becoming dedicated just to fixing electronics. This was an interesting story as far as parts sourcing goes though, so I thought it would be a cool one to share. Plus, you’ll get to learn how focus control works on webcams with autofocus.
I found a really good deal on eBay for two “for parts or not working” Razer Kiyo Pro webcams. These are pretty decent 1080p60 cameras with autofocus and nice image quality. Here’s the item description:
Web cam has been tested and does not power on
It looked like they were both returns to Amazon or a similar retailer, and surprise surprise, the description was completely wrong. They both powered on just fine.
One of them seemed to work great, and the other one was way out of focus and didn’t respond to any focus control commands at all. These cameras support manual and automatic focus control through software, but I just couldn’t get it to work at all on the faulty one.
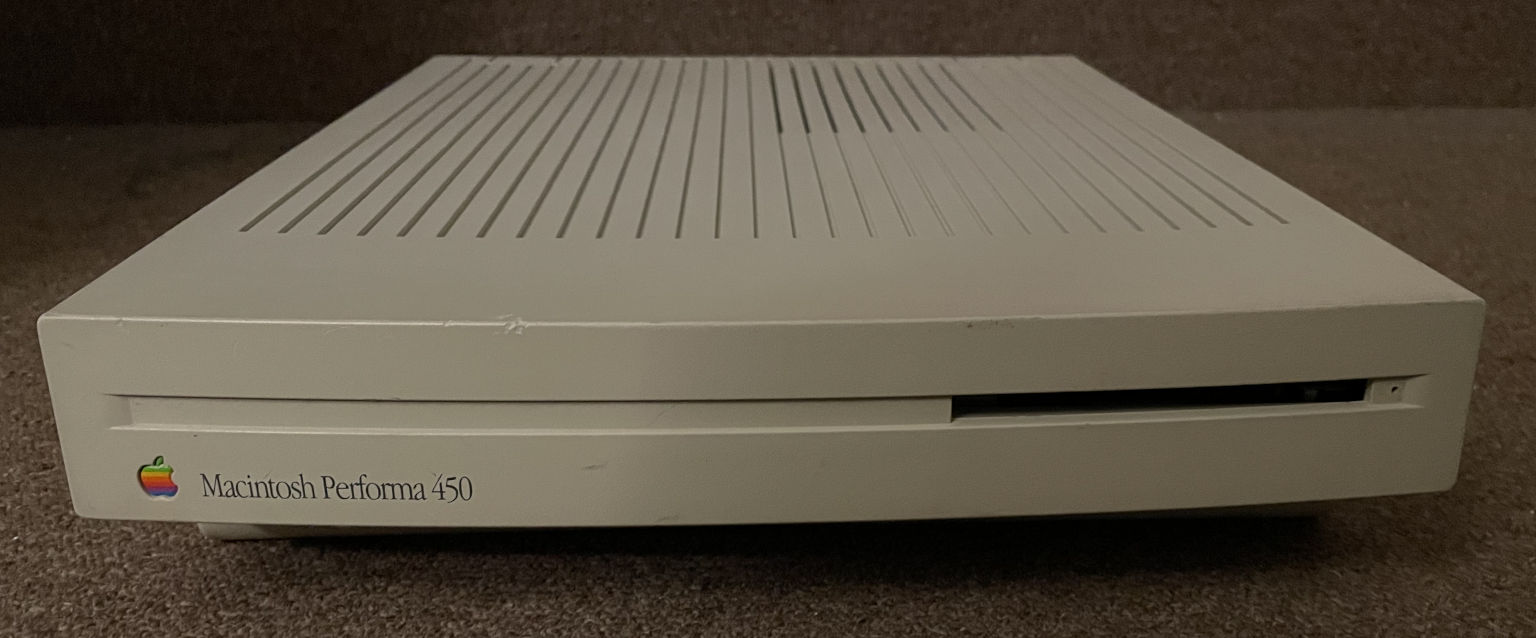
There have been some past rumblings on the internet about a capacitor being installed backwards in Apple’s Macintosh LC III. The LC III was a “pizza box” Mac model produced from early 1993 to early 1994, mainly targeted at the education market. It also manifested as various consumer Performa models: the 450, 460, 466, and 467. Clearly, Apple never initiated a huge recall of the LC III, so I think there is some skepticism in the community about this whole issue. Let’s look at the situation in more detail and understand the circuit. Did Apple actually make a mistake?
I participated in the discussion thread at the first link over a decade ago, but I never had a machine to look at with my own eyes until now. I recently bought a Performa 450 complete with its original leaky capacitors, and I have several other machines in the same form factor. Let’s check everything out!
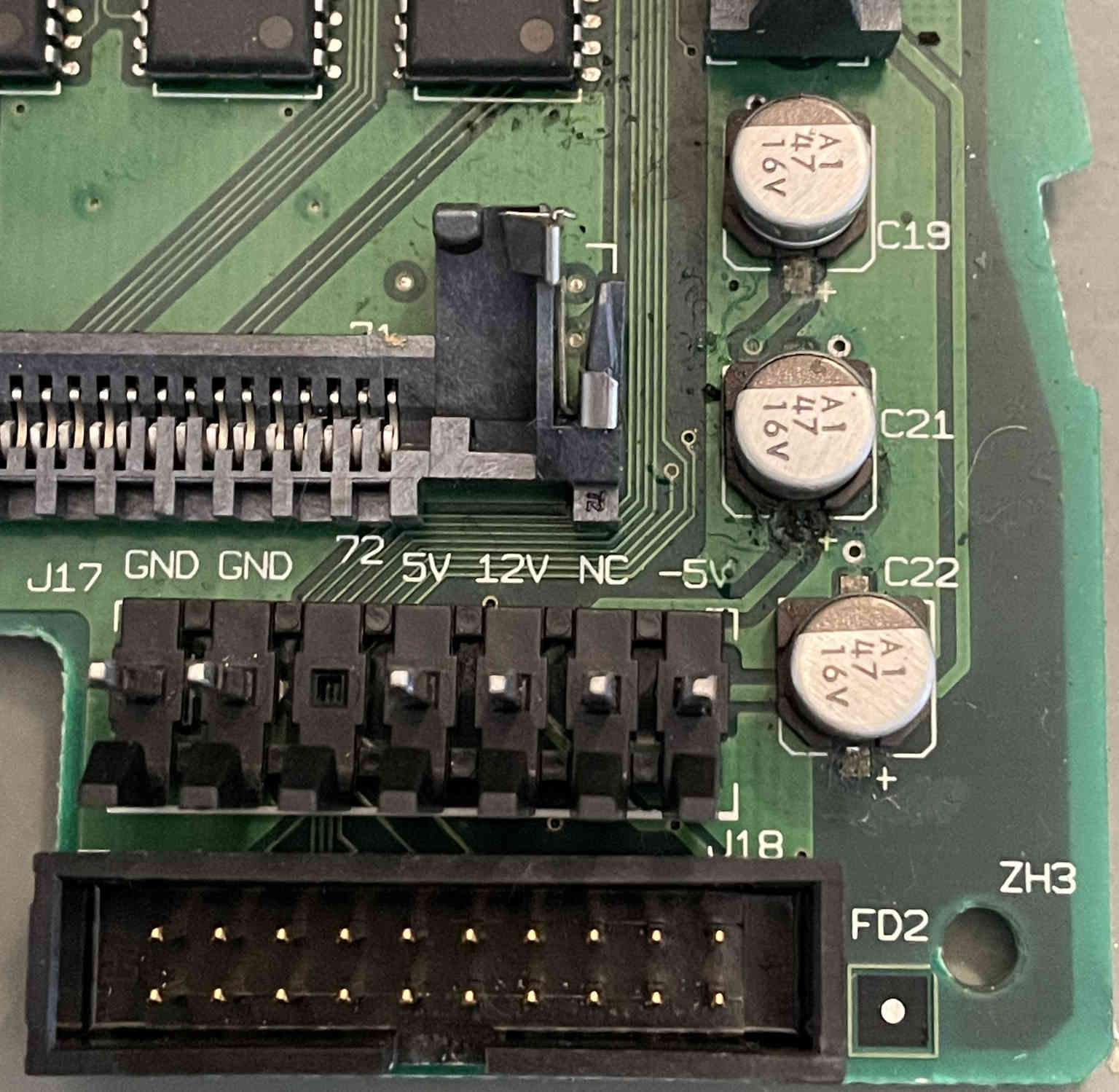
Here’s the affected section of the board before I removed the original capacitors. You can see that all three of these caps (C19, C21, and C22) have their negative side pointing upward, matching the PCB silkscreen that has the + sign at the bottom.